本文作者:鸟窝 smallnest
原文链接:https://colobu.com/2019/11/18/how-is-the-bigcache-is-fast/
最近看到 yoko 翻译的一篇文章: [译] Go 开源项目 BigCache 如何加速并发访问以及避免高额的 GC 开销[1],翻译自 How BigCache avoids expensive GC cycles and speeds up concurrent access in Go[2], 应该是 Douglas Makey Mendez Molero 在阅读了 bigcache 的作者写的 bigcache 设计文章Writing a very fast cache service with millions of entries in Go[3]做的一些调研和总结。
我在刚读取这篇文档的时候,顺着连接把相关的文章都找出来细细读了一遍,结合 bigcache 的代码,仔细学习了相关的优化设计,感觉设计非常的精妙,所以特意根据自己的理解又总结了一篇。
bigcache 的精妙的设计也吸引了 fasthttp 的作者 Aliaksandr Valialkin,他在 bigcache 的基础上,结合自己的公司的使用场景,进一步的做了相应的优化,也开源了这个项目 fastcache[4], 本文在最后也做了介绍。
bigcache 的作者也不是想当然的开发一个库,而且项目遇到了需求。需求如下:
为了满足这些需求,要求开发的 cache 库要保证:
作者考察了一番缓存框架比如 memcached、redis、couchbase 等,发觉都不太满足需求,因为这些都是独立的程序,访问它们需要网络的开销,延时无法保障,作者需要一个进程内的基于内存的 cache 库。虽然 Go 生态圈有众多的 cache 库如 LRU groups cache[5], go-cache[6], ttlcache[7], freecache[8],但是只有 freecache 满足需求,不过作者最后还是决定自己取开发一个 cache 库。
以上是 bigcache 诞生的背景,接下来我们欣赏一下 bigcache 和其它库优美的设计。
cache 就像一个大的 hashtable, 可不可以使用一个map[string][]byte + sync.RWMutex实现满足需求的 cache 呢?
sync.RWMutex虽然对读写进行了优化,但是对于并发的读,最终还是把写变成了串行,一旦写的并发量大的时候,即使写不同的 key, 对应的 goroutine 也会 block 住,只允许一个写执行,这是一个瓶颈,并且不可控。
解决并发的问题有一个方法叫做 shard (分片),每个分片一把锁。很多大并发场景下为了减小并发的压力都会采用这种方法,大的场景比如数据库的分片,小的场景就如刚才的场景。JAVA 8 之前的 ConcurrentMap 就是采用分片(segment)的方式减少竞争, Go 也有一个类似思想设计的 map 库:concurrent-map[9]。
对于每一个缓存对象,根据它的 key 计算它的哈希值: hash(key) % N, N是分片数量。理想情况下 N 个 goroutine 每次请求正好平均落在各自的分片上,这样就不会有竞争了,即使有多个 goroutine 落在同一个分片上,如果 hash 比较平均的话,单个 shard 的压力也会比较小。
竞争小了有什么好处?延迟可以大大提高,因为等待获取锁的时间变小了。
当然这里有一些要考虑的地方:
1、N 的选择
既然分片可以很好的降低锁的竞争,那么 N 是不是越大越好呢?当然不是,如果 N 非常大,比如每个缓存对象一个锁,那么会带来很多额外的不必要的开销。可以选择一个不太大的值,在性能和花销上寻找一个平衡。
另外, N 是 2 的幂, 比如 16、32、64。这样设计的好处就是计算余数可以使用位运算快速计算。
func (c *BigCache) getShard(hashedKey uint64) (shard *cacheShard) {
return c.shards[hashedKey&c.shardMask]
}
因为对于 2 的幂 N,对于任意的x, 下面的公式成立:
x mod N = (x & (N − 1))
所以只需要使用一次按位 AND (&)就可以求得它的余数。
2、选择 hash 算法
以前已经有非常多的哈希算法,最近几年也出现了一些新的哈希算法,也被人使用 Go 语言来实现。
很显然,一个优秀的哈希算法要保证:
项目hash-bench[10]对常用的几种 Hash 算法进行了比较。
bigcache 提供了一个默认的 Hash 的实现,采用 fnv64a 算法。这个算法的好处是采用位运算的方式在栈上进行运算,避免在堆上分配。
type fnv64a struct{}
const (
// offset64 FNVa offset basis. See https://en.wikipedia.org/wiki/Fowler–Noll–Vo_hash_function#FNV-1a_hash
offset64 = 14695981039346656037
// prime64 FNVa prime value. See https://en.wikipedia.org/wiki/Fowler–Noll–Vo_hash_function#FNV-1a_hash
prime64 = 1099511628211
)
// Sum64 gets the string and returns its uint64 hash value.
func (f fnv64a) Sum64(key string) uint64 {
var hash uint64 = offset64
for i := 0; i < len(key); i++ {
hash ^= uint64(key[i])
hash *= prime64
}
return hash
}
对于 Go 语言中的 map, 垃圾回收器在 mark 和 scan 阶段检查 map 中的每一个元素, 如果缓存中包含数百万的缓存对象,垃圾回收器对这些对象的无意义的检查导致不必要的时间开销。
bigcache 的作者做了测试。他们测试了简单的 HTTP/JSON 序列化(不会访问 cache)。在 cache 为空的时候 1 万的 QPS 的耗时大约 10 毫秒。当 cache 填满的时候, 99% 的请求都会超过 1 秒。监控显示堆中包含 4 千万的对象, GC 过程中的 mark 和 scan 也需要 4 秒。
我们可以很容易测试这种状况,比如下面的代码:
package main
import "time"
type Item struct {
A string
B string
C string
D string
E string
F string
G G
}
type G struct {
H int
I int
K int
L int
M int
N int
}
func main() {
m := make(map[int]*Item, 10*1024*1024)
for i := 0; i < 1024*1024; i++ {
m[i] = &Item{}
}
for i := 0; ; i++ {
delete(m, i)
m[1024*1024+i] = &Item{}
time.Sleep(10 * time.Millisecond)
}
}
只有一个 map 对象,里面包含一百万的元素,每 10 毫秒删一个放一个。
并发量相当小,并且单个的 goroutine 也没有竞争,但是由于元素的数量巨大,垃圾回收在mark/scan阶段需要花费上百毫秒进行标记和遍历。

那么如何解决这个问题呢?
我们知道垃圾回收器检查的是堆上的资源,如果不把对象放在堆上,不就解决这个问题了吗?还真有这样的项目offheap[11],它提供了定制的Malloc() 和 Free(),但是你的缓存需要基于这些方法定制。当然一些基于垃圾回收的编程语言为了减少垃圾回收的时间,都会提供相应的库,比如Java: ChronicleMap, Part 1: Go Off-Heap[12]。堆外内存很容易产生内存泄漏。
第二种方式是使用 freecache[13]。freecache 通过减少指针的数量以零 GC 开销实现 map。它将键和值保存在ringbuffer中,并使用索引查找对象。
第三种优化方法是和 Go 1.5 中一个修复有关(#9477[14]), 这个 issue 还描述了包含大量对象的 map 的垃圾回收时的耗时问题,Go 的开发者优化了垃圾回收时对于 map 的处理,如果 map 对象中的 key 和 value 不包含指针,那么垃圾回收器就会对它们进行优化:
runtime: do not scan maps when k/v do not contain pointers
Currently we scan maps even if k/v does not contain pointers. This is required because overflow buckets are hanging off the main table. This change introduces a separate array that contains pointers to all overflow buckets and keeps them alive. Buckets themselves are marked as containing no pointers and are not scanned by GC (if k/v does not contain pointers).
This brings maps in line with slices and chans -- GC does not scan their contents if elements do not contain pointers.
Currently scanning of a map[int]int with 2e8 entries (~8GB heap) takes ~8 seconds. With this change scanning takes negligible time.
https://go-review.googlesource.com/c/go/+/3288
所以如果我们的对象不包含指针,虽然也是分配在堆上,但是垃圾回收可以无视它们。
如果我们把 map 定义成 map[int]int,就会发现 gc 的耗时就会降下来了。

遗憾的是,我们没办法要求用户的缓存对象只能包含int、bool这样的基本数据类型。
解决办法就是使用哈希值作为map[int]int的 key。把缓存对象序列化后放到一个预先分配的大的字节数组中,然后将它在数组中的 offset 作为map[int]int的 value。
type cacheShard struct {
hashmap map[uint64]uint32
entries queue.BytesQueue
lock sync.RWMutex
entryBuffer []byte
onRemove onRemoveCallback
isVerbose bool
statsEnabled bool
logger Logger
clock clock
lifeWindow uint64
hashmapStats map[uint64]uint32
stats Stats
}
func (s *cacheShard) set(key string, hashedKey uint64, entry []byte) error {
currentTimestamp := uint64(s.clock.epoch())
s.lock.Lock()
// 查找是否已经存在了对应的缓存对象,如果存在,将它的值置为空
if previousIndex := s.hashmap[hashedKey]; previousIndex != 0 {
if previousEntry, err := s.entries.Get(int(previousIndex)); err == nil {
resetKeyFromEntry(previousEntry)
}
}
// 触发是否要移除最老的缓存对象
if oldestEntry, err := s.entries.Peek(); err == nil {
s.onEvict(oldestEntry, currentTimestamp, s.removeOldestEntry)
}
// 将对象放入到一个字节数组中,如果已有的字节数组(slice)可以放得下此对象,则重用,否则新建一个字节数组
w := wrapEntry(currentTimestamp, hashedKey, key, entry, &s.entryBuffer)
for {
// 尝试放入到字节队列中,成功则加入到map中
if index, err := s.entries.Push(w); err == nil {
s.hashmap[hashedKey] = uint32(index)
s.lock.Unlock()
return nil
}
// 如果空间不足,移除最老的元素
if s.removeOldestEntry(NoSpace) != nil {
s.lock.Unlock()
return fmt.Errorf("entry is bigger than max shard size")
}
}
}
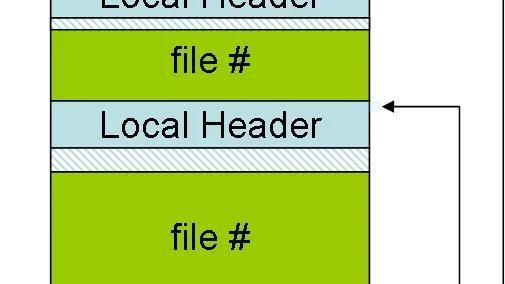
func wrapEntry(timestamp uint64, hash uint64, key string, entry []byte, buffer *[]byte) []byte {
keyLength := len(key)
blobLength := len(entry) + headersSizeInBytes + keyLength
if blobLength > len(*buffer) {
*buffer = make([]byte, blobLength)
}
blob := *buffer
binary.LittleEndian.PutUint64(blob, timestamp)
binary.LittleEndian.PutUint64(blob[timestampSizeInBytes:], hash)
binary.LittleEndian.PutUint16(blob[timestampSizeInBytes+hashSizeInBytes:], uint16(keyLength))
copy(blob[headersSizeInBytes:], key)
copy(blob[headersSizeInBytes+keyLength:], entry)
return blob[:blobLength]
}
queue.BytesQueue 是一个字节数组,可以做到按需分配。当加入一个[]byte时,它会把数据 copy 到尾部。
值得注意的是删除缓存元素的时候 bigcache 只是把它的索引从map[uint64]uint32中删除了,并把它在queue.BytesQueue队列中的长度置为 0。那么删除操作会不会在queue.BytesQueue中造成很多的“虫洞”?从它的实现上来看,会, 而且这些"虫洞"不会被整理,也不会被移除。因为它的底层是使用一个字节数组实现的,"虫洞"的移除是一个耗时的操作,会导致锁的持有时间过长。那么寻找合适的"虫洞"重用呢?虽然遍历的方法寻找"虫洞"也是一个比较耗时的操作,我觉得这里有优化的空间。
bigcache 只能等待清理最老的元素的时候把这些"虫洞"删除掉。
对于 bigcache 来说,剔除还有意义吗?或许有。如果我们不想使用某个 key 的缓存对象,我们可以把它删除。
首先,在增加一个元素之前,会检查最老的元素要不要删除。
if oldestEntry, err := s.entries.Peek(); err == nil {
s.onEvict(oldestEntry, currentTimestamp, s.removeOldestEntry)
}
其次,在添加一个元素失败后,会清理空间删除最老的元素。
同时, 还会专门有一个定时的清理 goroutine, 负责移除过期数据。
另外需要注意的是缓存对象没有读取的时候刷新过期时间的功能,所以放入的缓存对象最终免不了过期的命运。
另外所有的缓存对象的 lifewindow 都是一样的,比如 30 分钟、两小时。
所以,如果你真的使用 bigcache, 还是得需要注意它的这些设计,看看这些设计是否和你的场景相吻合。
bigcache 在特定时候还是有问题,就是当 queue.BytesQueue 的容量不够的时候,它会进行扩展,扩展是一个很重的操作,它会复制原来的数据到新的字节数组上。
fasthttp 的作者采用类似 bigcache 的思想实现了fastcache[15],他使用 chunks [][]byte替换 queue.BytesQueue,chunk 是一个 ring buffer, 每个 chunk 64KB。
type bucket struct {
mu sync.RWMutex
// chunks is a ring buffer with encoded (k, v) pairs.
// It consists of 64KB chunks.
chunks [][]byte
// m maps hash(k) to idx of (k, v) pair in chunks.
m map[uint64]uint64
// idx points to chunks for writing the next (k, v) pair.
idx uint64
// gen is the generation of chunks.
gen uint64
getCalls uint64
setCalls uint64
misses uint64
collisions uint64
corruptions uint64
}
虽然chunks [][]byte也包含很多的 chunk, 但是由于 chunk 的 size 比较大,所以可以大大缩小垃圾回收需要 mark/scan 的对象的数量。带来的好处就是扩容的时候只需要增加更多的 chunk 即可。
删除还是一样,只是从 map 中删除,不会从chunks中删除。
fastcache 没有过期的概念,所以缓存对象不会被过期剔除。
[1]
[译] Go开源项目BigCache如何加速并发访问以及避免高额的GC开销: https://pengrl.com/p/35302/
[2]
How BigCache avoids expensive GC cycles and speeds up concurrent access in Go: https://dev.to/douglasmakey/how-bigcache-avoids-expensive-gc-cycles-and-speeds-up-concurrent-access-in-go-12bb
[3]
Writing a very fast cache service with millions of entries in Go: https://allegro.tech/2016/03/writing-fast-cache-service-in-go.html
[4]
fastcache: https://github.com/VictoriaMetrics/fastcache
[5]
LRU groups cache: https://github.com/golang/groupcache/tree/master/lru
[6]
go-cache: https://github.com/patrickmn/go-cache
[7]
ttlcache: https://github.com/diegobernardes/ttlcache
[8]
freecache: https://github.com/coocood/freecache
[9]
concurrent-map: https://github.com/orcaman/concurrent-map
[10]
hash-bench: https://github.com/smallnest/hash-bench
[11]
offheap: https://godoc.org/github.com/glycerine/offheap
[12]
Java: ChronicleMap, Part 1: Go Off-Heap: https://dzone.com/articles/java-chroniclemap-part-1-go-off-heap
[13]
freecache: https://github.com/coocood/freecache
[14]
#9477: https://github.com/golang/go/issues/9477
[15]
fastcache: https://github.com/VictoriaMetrics/fastcache