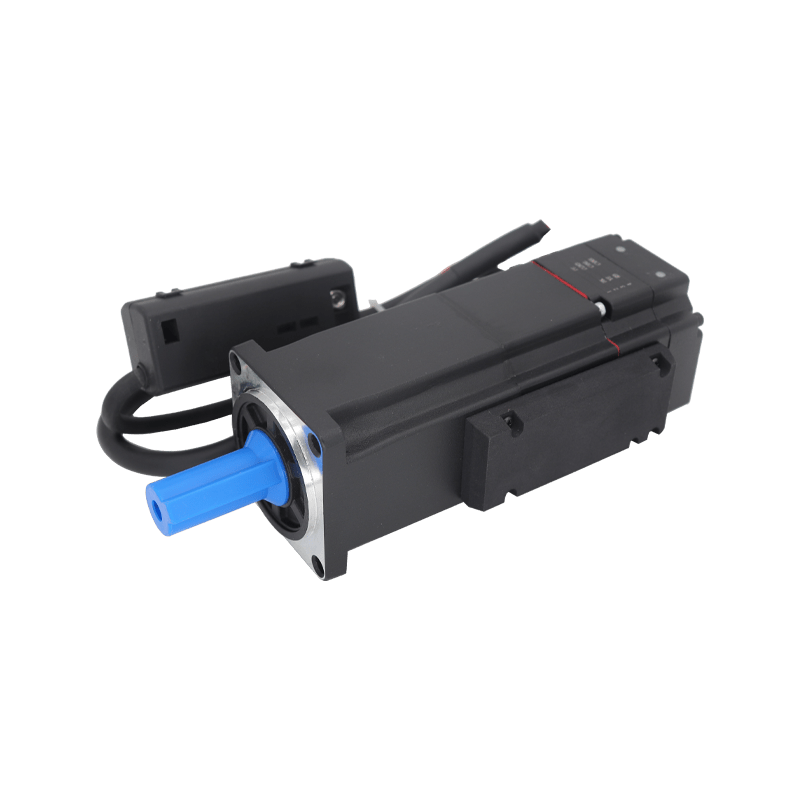
伺服电机的回零模式是指将伺服电机从当前位置移动到一个预定的参考位置,也称为“零点”或“原点”。回零操作通常在系统启动时或需要重新对位置进行校准时执行。
回零模式的主要目的是确保伺服电机的位置准确性和一致性。通过回零操作,可以消除累积误差、校正位置偏差,并确保伺服电机在每次启动时都能回到相同的初始位置。
回零模式通常包括以下步骤:
(1)启动:开始回零操作前,首先启动伺服电机和控制系统。
(2)运动到参考位置:伺服电机以预设的速度和方向运动到预定的参考位置。这个参考位置通常是一个已知的固定点,例如机械结构的起始位置或传感器的触发点。
(3)检测信号:当伺服电机到达参考位置时,会检测一个特定的信号或条件,例如光电开关触发、编码器计数归零等。这个信号用于确定伺服电机已经回到了参考位置。
(4)停止和校准:一旦检测到信号,伺服电机会停止运动,并进行位置校准。校准的方式可以是重置编码器计数、调整控制参数或其他相关操作。
(5)完成回零:一旦校准完成,伺服电机就被认为已经回到了零点或原点位置。此时,伺服电机可以开始执行其他运动任务。
欢迎找我进行具体的了解。