因为 corner case 的存在,自动驾驶很难落地。”这是摆在 ADAS 公司和自动驾驶公司所面临的量产难题。
在深度学习小步快跑的八年里,大批玩家开始涌入 ADAS 行业,在快速发展之后,这批供应商们开始面临发展瓶颈。资本给到他们的耐心、钱已经越来越少,技术更新迭代的时间越来越紧,如果跟不上这个节奏,那么很有可能被市场淘汰。

上海智驾科技创始人周圣砚如是说。
(上海智驾科技成立于 2016 年,是专注汽车 ADAS 领域的公司,它们主要提供汽车前视摄像头以及相关的解决方案。)
在与周圣砚的对话中,我们听到了不少有趣的观点。

不怕互联网程序员“抢饭碗”
随着汽车智能化的快速发展,越来越多的互联网人开始涌入这个行业,对于程序员抢汽车人“饭碗”这事儿,周圣砚不以为意。
作为老汽车人,周圣砚认为,后深度学习时代,堆算力看上去是必由之路,但这不是计算机专业的人能完全解决的,需要汽车专业的人去结合场景具体问题具体分析,这是汽车人的不可替代性。
5G 很热,但单车智能该干嘛还是干嘛
5G 已经开始走向寻常百姓家,商用进程也在稳步推进,中国作为 5G 的领头羊,国内科技公司也是搭上这一技术的顺风车,汽车供应商们也不例外,旗下各种产品技术开始争先恐后地接入 5G。

周圣砚认为,5G 虽然很热,但单车智能依然还是该干嘛干嘛,5G 的诞生不会弱化智能汽车比如 26262 等相关技术标准,感知、决策、执行,该做的工作一步都不能少。
不过周圣砚也大胆预测了 5G 时代,自动驾驶汽车可以走的一些“捷径”,比如自动驾驶车辆必不可少的系统备份是不是可以放到低时延、高带宽的 5G 服务器中去呢?L2 和 L4 的车辆能否通过 5G 通信分享数据,在马路上和谐共处呢?
自动驾驶的“二八定律”
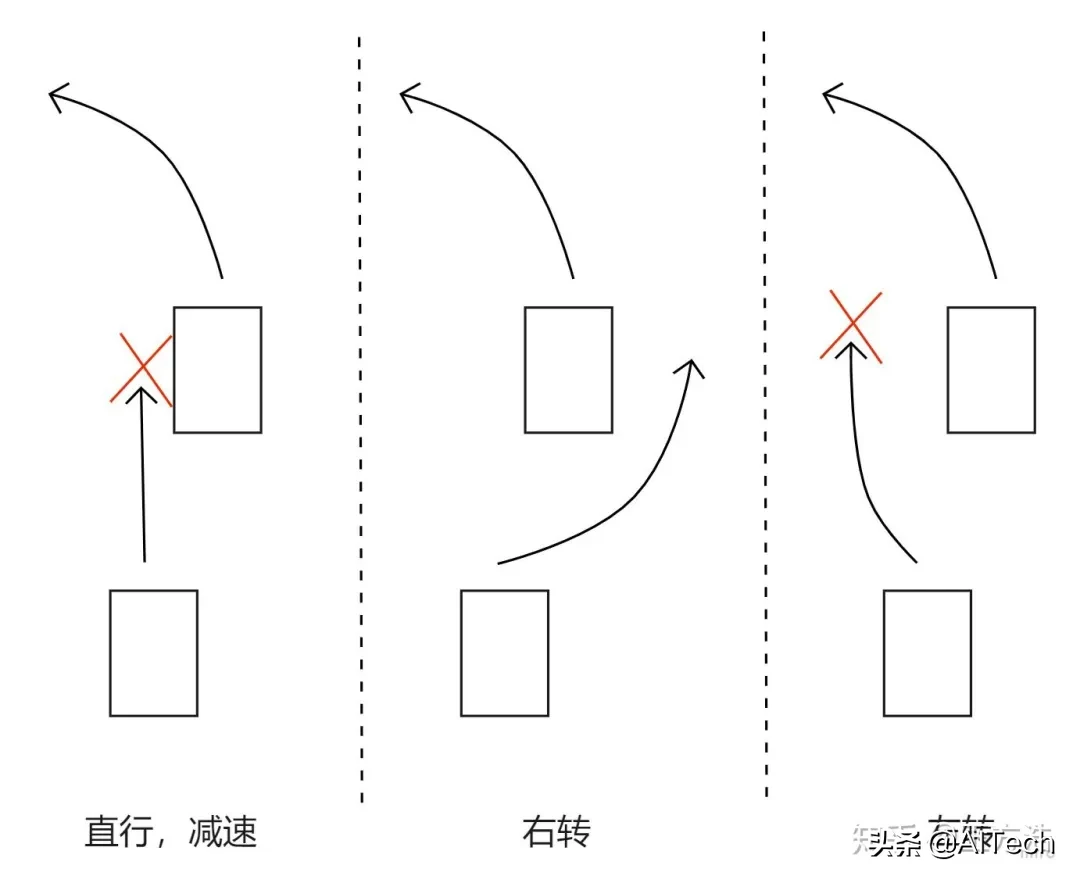
随着自动驾驶迈向更高级别,一些 corner case 开始出现,机器在面对一些没有学习过的特殊场景开始表现得束手无策,这也成为了高等级自动驾驶量产落地的绊脚石。
“行业正在用 80% 的精力去解决这 20% 的问题。”这就是周圣砚口中提到的自动驾驶“二八法则”,只有解决这部分最难的问题,自动驾驶才可以说得上能够真正落地。
深度学习的核心当然还是数据,只有足够的数据,机器才能有足够的样本去把这些 corner case 琢磨透彻。行业内数据共享这件事儿的呼声也越来越高。

前不久的特斯拉台湾事故可以说是一个经典的“corner case”:一辆 Model 3 撞上侧翻的厢式货车。”周圣砚相信,特斯拉已经具备足够的能力通过 OTA 解决这个问题,但贸然 OTA 可能会带来额外的副作用,验证完毕后,特斯拉一定能够解决掉。
特斯拉视觉方案的忠实拥趸,但马斯克过激了?
周圣砚是个忠实的“特斯拉粉”,他同样笃信视觉方案能够“低本高效”地解决自动驾驶的感知问题,当我问及他怎么看待“马斯克说用激光雷达的都是傻子”这个观点的时候,周圣砚笑了笑说,“马斯克这话有点过激了。”
事实上,特斯拉与智驾科技MAXIEYE都在试图通过视觉方案的革命,解决更多问题。智驾科技MAXIEYE的思路是采用一套虚拟激光雷达技术,简单来说就是利用摄像头采集三维/二维图像进行建模,计算出图像中每个像素的距离信息。这就达到了类似激光雷达的效果,同时可以降低成本。

目前智驾科技推出的单目摄像头可以感知丰富的信息,并实现较为精准的测距:
1、地面的标识标线,车道线、停车线、斑马线,还有导向箭头、可行驶区域。
2、地面上运动目标,道路的参与者,人、车、骑行者这些相对运动机动性比较强的目标识别。
3、红绿灯、标志牌、空中级目标。
官方说法是在 50m 情况下可以接近激光雷达的识别精度,车辆识别距离达到 200m(天气完美的时候 250m)、行人等小目标大概是 100m。
通过机器视觉,智驾科技还推出了一些有趣的贴心功能,比如串联自动大灯功能,实现进隧道大灯秒开;又比如集成智能雨刮功能,通过对雨量的精准监控控制雨刷挡位。
在摄像头图像的协助下,这些小功能相比依靠传统传感器体验上要好很多。
和马斯克一样 ,周圣砚相信视觉为主的传感器方案在 ADAS/自动驾驶领域大有可为,但他比马斯克更宽容,他不排斥激光雷达方案,他认为自动驾驶行业是需要分工的,每家公司要解决自己擅长的问题。